Blender 190 – Simple Machines 1, Part 2 – Rigging, Bones
In Part 2 wird dem Versuchsaufbau des Industrie Roboters das Rigging hinzugefügt. Es wird ein Skelett erstellt und die einzelnen Bones mit den Objekten verbunden. Am Ende wird die Bewegungsfreiheit über Bone Constraints eingeschränkt.
Skills: Intermediate
Addon: Nein
Download: Der Download enthält zwei fertige Blenderfiles zum Tutorial. Download via Mediafire.
Armature – Skelett anlegen
Grundsätzlich startet man mit dem Aufbau einer Armature (Skelett) im Object-Mode. Über den Shortcut SHIFT-A wird der Szene eine Armature hinzugefügt. Vor Blender 2.8 hatte man noch Single Bone auszuwählen. Seit Blender 2.8 ist dieser zusätzliche Eintrag nicht mehr vorhanden.
Zuerst einmal fällt auf das sich in vielen Fällen die Bones von Objekten verdeckt werden, die sich auf dem Arbeitsbereich befinden (siehe Animation unten).

Bone innerhalb von Objekt
In der Properties-Palette unter dem Reiter Object können die Bones wieder sichtbar gemacht werden. In früheren Blender Versionen nannte sich das X-Ray, was wir immer sehr lustig fanden, aber jetzt heißt der Eintrag nur noch schlicht In Front. Der Bone kann dann noch über Viewport Display in verschiedenen Darstellungsvarianten erscheinen, wobei Wire (Draht, Drahtgitter) meist das sinnvollste sein wird (siehe Bild unten).

Sichtbarkeit durch In Front
In vielen Fällen ist es unbedingt ratsam sich die Achsen der Bones einzublenden. Unter dem Reiter Object Data ist daher Axes zu aktivieren (siehe Bild unten).

Bones-Achsen anzeigen
So vorbereitet kann man nun fortschreiten. Dazu wird in den Edit-Mode gewechselt (TAB-Taste), in welchem sich das Aussehen des Bone leicht verändert. In diesem Modus lässt sich auch der obere Handle des Bone markieren und verschieben. Darüber wird der Knochen so skaliert das er von unten bis oben den Balken abdeckt (siehe Bild unten).

Mit Handle Bone skalieren
Wir befinden uns auch weiterhin im Edit-Mode! Der obere Handle des ersten Bone ist immer noch markiert. Mit Taste E kann ein weiterer Bone extrudiert werden und zusätzlich mit Taste Z auf der z-Achse zum nächsten Teilstück aufgezogen werden (siehe Animation unten).

Neuen Bone extrudieren
Alle auf diese Weise erzeugten Bones (Extrude im Edit Mode) bilden die Armature (das Skelett). Im Outliner wird nur die Armature angezeigt, denn die neuen Bones werden dem untergeordnet hinzugefügt. Klappt man die Armature im Outliner auf, so erscheint die Bone-Struktur.
Auf diese Weise wird auch der dritte Balken mit einem Bone versehen (siehe Animation unten).

Weiterer Bone (Extrude)
Jetzt folgen zwei Richtungswechsel. Zuerst wird aus dem letzten Bone ein weiterer Bone extrudiert, aber nach unten aufgezogen. Dann ein folgt ein weiterer Bone der wieder aufwärts zeigt und bis ans untere Ende der Greifer-Arme reicht (siehe Bild unten).

Zwei Richtungswechsel
Ein weiterer letzter Bone wird extrudiert und in die Richtung des rechten Greifers aufgezogen (siehe Animation unten).
Abschließender Bone
IN der Seitenansicht kann noch einmal kontrolliert werden, ob alles gut deckungsgleich auf Achse liegt (siehe Animation unten).

Ansichten kontrollieren
Einer der beiden kürzeren Bones, die bei den Richtungswechseln angelegt wurden, kann jetzt gelöscht werden. Es handelt sich m den Bone der wieder aufwärts zeigt (siehe Animation unten).

Aufwärts Bone löschen
Warum wird gelöscht? Die Antwort ist im Bild unten zu entnehmen. Das linke Bild zeigt die richtige Löschung und den Zweck des abwärts verlaufenden Bone. Er führt den Greifer-Bone. Mit diesem Bone werden später die beiden Greifer parallel die Richtung wechseln können. Und das genau am Drehpunkt (siehe Animation unten).
Im Bild rechts ist das nicht der Fall. Der Drehpunkt ist nicht der gleiche. Beide Bones sind zwar mit dem Greifer verbunden, aber nur der Bone aus der linken Ansicht ist in diesem Fall der sinnvolle (siehe Animation unten).

Bone-Funtionalität im Vergleich
Ordnung halten!
Auch bei dem Skelett sollte man sich von Anfang an angewöhnen die einzelnen Bones sinnvoll umzubenennen. Je komplexer das Armature, desto schneller wird es ansonsten unübersichtlich (siehe Bild unten).

Bones umbenennen
Set Parent to
Der Ablauf des Riggens unterscheidet sich bei dieser Bauweise von zum Beispiel, der eines Characters der aus einem kompletten Körper besteht( siehe Robot). Hier liegen einzelne Balken (Robot-Arme) vor, die nicht miteinander verbunden sind.
Die Vorgehensweise um einzelne Objekte mit einem Skelett zu verbinden findet in ständigem Wechsel zwischen Object- und Pose-Mode statt. Grundsätzlich ist immer erst das Objekt im Object-Mode auszuwählen, dann die Armature im Ganzen. Danach findet über STRG-TAB ein Wechsel in den Pose-Mode statt, wo der entsprechende Bone markiert wird.
Begonnen wird mit dem ersten Balken unten. Balken auswählen (Object-Mode), danach die Armature. Über STRG-TAB der Wechsel in den Pose-Mode und dort wird der zugehörige Bone markiert. Dieser verfärbt sich daraufhin grün (siehe Animation unten).

Armteil und zugehöriger Bone
Über STRG-P gelangt man zu den Optionen zu Set Parent to wo Bone gewählt wird (siehe Bild unten).
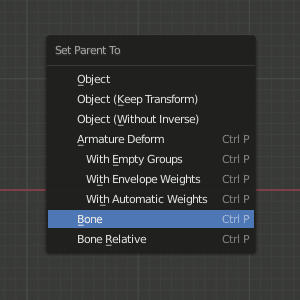
STRG-P für Set Parent to
Wird der Bone anschließend rotiert sollte sich schon das erste Teilstück des Robot-Arms mit bewegen. Ein gutes Zeichen (siehe Animation unten).

Objekt und Bone verbunden
So arbeitet ihr euch hoch bis zum letzten Armteil. Der abwärts laufende Bone wird übersprungen. Änderung daran finden später statt!
Stattdessen wird der rechte Greifer auf die gleiche Weise mit dem letzten Bone verbunden (siehe Animation unten).

Letzter Bone – Greifer
Bewegt ihr den Bone wird sich das Teilstück der Greifzange mit dem Knochen bewegen (siehe Animation unten).

Greifhand Teil 1
Bewegt ihr den abwärts laufenden Bone, so wird sich die Greifhand, zumindest der rechte Teil davon inklusive Greifer-Bone bewegen. Es mag zwar auf den ersten Blick keinen Unterschied zu oben geben, aber das täuscht, solange nicht auch der linke Greifer im Spiel ist.
Der obere Bone ist für die Einzelteile der Greifzange zuständig, während der abwärts laufende Bone die komplette Greifhand bewegen kann (siehe Bild unten).

Handbewegung
Kommen wir zu dem bisher unbeachteten linken Teilstück der Greifzange. Die Idee ist die Rotation des obersten Bone zu kopieren. Dazu wird das Teil im Object-Mode markiert (siehe Bild unten).

Linke Greifzange markieren
In der Properties-Palette wird diesem Teilstück über den Reiter Object-Constraint ein Copy Rotation hinzugefügt (siehe Bild unten).

Object Constraint – Copy Rotation
Die unten abgebildeten Einstellungen können übernommen werden. Target ist das Skelett (Armature) und vom Skelett der Bone mit der Bezeichnung B5. Die Bewegung wird auf dem Local Space (lokale Achse) kopiert (siehe Bild unten).

Copy Rotation Settings
Unterschied zwischen World- und Local-Space kann hier nachgelesen werden. Ausschlaggebend ist dabei die lokale Achse des Bone, die wir ja vorausschauender Weise sichtbar gemacht hatten (siehe Bild unten).

Bone Achsen
Korrekturen
Bewegt man nun im Pose Mode den obersten Bone (B5) dann wird man mit Schrecken feststellen das sich die linke Greifzange in die falsche Richtung bewegt. Kein Problem.
Im Edit-Mode wird das Teilstück auf der z-Achse um Minus 90 ° Grad gedreht. Shortcut ist S-Z- minus 90 (siehe Animation unten).

Rotieren im Edit-Mode
Danach wechselt ihr wieder in den Object-Mode und dreht das Ganze erneut. Dieses Mal aber um plus 90 ° Grad. Das Teilstück wird daraufhin zwar wieder in die richtige Richtung gedreht, aber an eine falsche Position gerückt. Wichtig ist hier nur das der Origin am gleichen Punkt geblieben ist (siehe Animation unten).

Im Object-Mode rotieren
Im Edit-Mode wird die Position des Teilstücks korrigiert. Im Edit-Mode deshalb, weil der Origin weiterhin auf dem festgelegten Drehpunkt verbleiben soll. Auch in der Draufsicht muss nachgerückt werden (siehe Animation unten).
Position nachbessern
Wird jetzt der oberste Bone B5 bewegt so zeigt sich das die Greifzange nun zugreifen kann (siehe Animation unten).

Cool
Zuletzt wird der linke Teil der Greifzange markiert und der abwärts verlaufende Bone (Bone B4). Über STRG-P – Bone werden die beiden verbunden.
Wird Bone B4 jetzt bewegt wird auch seine Funktion deutlich! Die Greifhand ist jetzt flexibel und bildet sozusagen das Handgelenk. Greifhand und Greifzangen können unabhängig voneinander bewegt werden (siehe Animation unten).

Handgelenk
Bone Constraint – Limit Rotation
Abschließend soll die Bewegungsfreiheit der einzelnen Bones eingeschränkt werden. Dazu wird der gewünschte Bone im Pose-Mode markiert (siehe Bild unten).

Bone markieren (Pose-Mode)
In der Properties-Palette findet ihr den Eintrag Bone Constraint. Dort habt ihr die Möglichkeit Limit Rotation auszuwählen. Der Abstand zwischen den Eingabewerten zu Minimal und Maximal wird der Bewegungsspielraum sein. Die Eingabewerte für die Greifzangen kann dem Bild unten entnommen werden. Eingeschränkt wird die Rotation auf der lokalen Achse (siehe Bild unten).
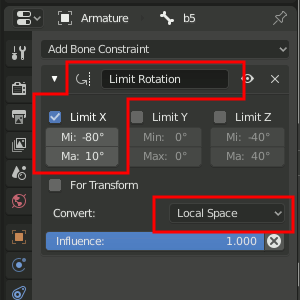
Bewegungsspielraum
Der gleiche Vorgang nur mit anderen Werten wird bei dem Handgelenk wiederholt (siehe Bild unten).

Handgelenk markieren (Pose-Mode)
Auch hier können die Werte dem Bild unten entnommen werden. Zu beachten ist das sich die Limitierung hier auf der z-Achse vorgenommen wird, aber nach wie vor im Local-Space stattfindet (siehe Bild unten).

Handgelenk limitieren
So können bis nach unten alle Bones eingeschränkt werden.
Viel Erfolg.